Advancing Robot Learning with AgileRL
An Academic Research Implementation with University of Minnesota
An Academic Research Implementation with University of Minnesota
In the complex world of robotics research, where theoretical advances must be translated into practical robot behaviors, choosing the right reinforcement learning framework is crucial. For the University of Minnesota’s research lab focused on developing novel robot algorithms and applications, the implementation of AgileRL provided a powerful platform for pushing the boundaries of multi-agent reinforcement learning in real-world robotics applications.
Within a ten-person research lab dedicated to advancing robotic systems, the challenge of implementing sophisticated reinforcement learning algorithms for real-world robot tasks requires both theoretical rigor and practical applicability. The lab's focus on developing novel robot algorithms demands tools that can handle the complexity of multi-agent systems while remaining flexible enough to accommodate cutting-edge research requirements.
Their work involves integrating multiple sophisticated components, including:
• PhaseSpace X2E LED motion capture system
• Hokuyo UST-20LX LiDAR
• Trampa Board VESC driving a car-like robot
• ROS2 middleware for robot communication
This complex integration of hardware and software systems requires a reinforcement learning framework that can reliably bridge the gap between theoretical models and physical robot behaviour.

Before implementing AgileRL, the research relied on stable-baselines3 for their reinforcement learning experiments. However, this solution presented several significant limitations that hindered the research progress:
• Algorithm Accessibility: The implementation details in stable-baselines3 were obscured behind simplified frontend wrappers, making it difficult to customize algorithms or introduce new features for research purposes.
• Multi-Agent Limitations: The lack of support for PettingZoo environments significantly constrained their ability to develop multi-agent systems, a crucial requirement for their research.
• Environment Vectorization: The inability to easily vectorize environments created bottlenecks in the training process, limiting the efficiency of their experiments.
These limitations were particularly challenging for research that required detailed control over algorithm implementation and the ability to rapidly prototype new ideas in multi-agent scenarios.
The implementation of AgileRL in October 2023 marked the beginning of a significant advancement in their research capabilities. The implementation process followed a structured approach:
Initial Integration:
1. Design of custom multi-agent environment
2. Implementation of PettingZoo wrapper
3. Development of custom training loop based on AgileRL documentation
4. Creation of specialized testing and scoring systems
Framework Development:
During the integration, the lead researcher, Burak Gonultas, contributed to the platform's evolution by developing a bare-bones wrapper for multi-agent environment vectorization, which was later integrated and enhanced by the AgileRL development team.
The impact of AgileRL on the research program manifested in several key areas:
• Development Efficiency: The built-in multi-agent capabilities and PettingZoo integration significantly reduced development overhead, enabling faster time-to-value.
• Algorithm Implementation: The framework's support for MADDPG and PPO algorithms, combined with its flexibility for customisation, enabled more sophisticated research approaches.
• Integration Capabilities: The successful integration with complex robotics hardware demonstrated the framework's ability to bridge the gap between theoretical models and practical implementation.
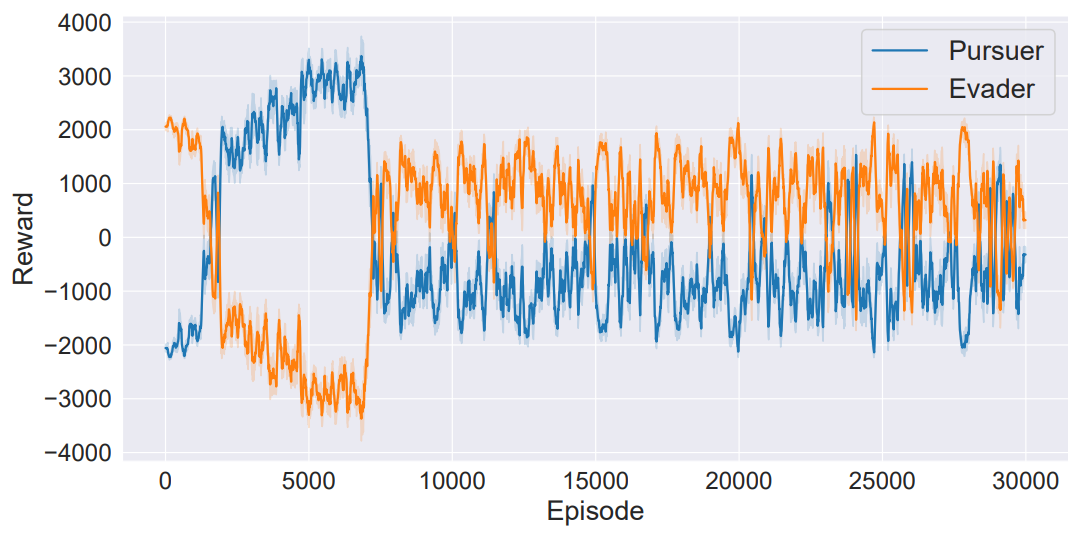
+30%
Pursuit performance
+5%
Evasion performance
vs. existing baselines
This implementation of AgileRL demonstrates how the right framework can accelerate robotics research by providing both the necessary technical capabilities to fast track the engineering process and the scientific advancements leading to faster training and experimentation cycles. The success in integrating AgileRL with complex robotics hardware while maintaining the ability to experiment with novel algorithms showcases the framework's potential for advancing both theoretical research and practical robotics applications.
You can read the full academic report here.
If you would like to take part in a case-study with AgileRL, please reach out on LinkedIn.